 |
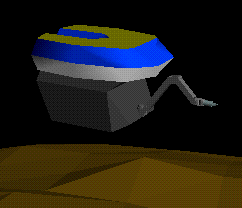
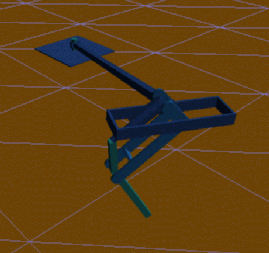
Aquarobot: an underwater walking robot developed and built by the Port
and Harbour Research Institute (PHRI) in Yokosuka, Japan. A joint project
with Naval Postgraduate School
(NPS) from 1992 to 1994 to develop a better control system. I developed
a real-time graphical simulation of this robot using DynaMechs for the
dynamic and hydrodynamic computations to provide a simulation testbed (and
virtual environment) for control system development environment off-site. |
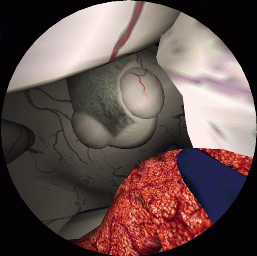 |
Third Ventriculostomy: developed at HT
Medical in 1996, a flexible endoscope is tracked using a special-purpose
input device, which drives the simulation of the flexible scope as it navigates
through a through a 3D model of lateral and third ventricles (cavities)
of the brain. Collision detection using a multiprocessing version of intersection
testing helps add realism to the interaction. |
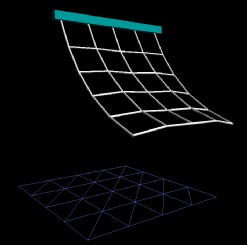
| The mesh: A demostration of the the closed-chain algorithm developed
by Duane Marhefka at The Ohio State University (1999) [AVI]
for their NSF galloping quadruped project. The number loops in the
mechanism goes up with the square of n, where n is the number of links
on one side of the mesh. Meshes of size n=7 were simulated to show
the stability of the algorithm in implementing the loop constraints. |
 |
 |
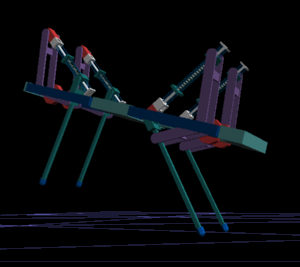
Leg Simulation Testbed: This effort at The Ohio State University uses
DynaMechs to simulate prototype legs for their galloping quadruped project
(2000) [AVI]. The leg is equipped with
an extension spring for energy storage and reduction of impact forces.
The mechanical and control designs of the actual leg have benefited from
the force data obtained through this simulation testbed. |
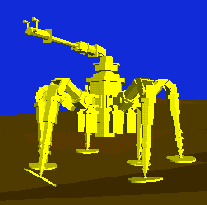
| The Ohio State Quadruped: one of the prototype quadruped models developed
by Duane Marhefka for Ohio State's most recent project to build an actual
galloping quadruped (2000) [AVI]. This
project is sponsored by the National Science Foundation and is under the
supervision of Profs. Kenneth Waldron and David Orin. This model
was useful in investigating 3D control of the quadruped. |
 |
|